パソコン版のウェブサイトを表示中です。
(広報誌「地震本部ニュース」令和4年(2022年)夏号)

2011年東北地方太平洋沖地震(以下「東北沖地震」という)のような海溝型巨大地震は、陸側のプレートとその下に沈み込む海洋プレートとの境界がすべることで発生し、地震時にも大きな地殻変動をもたらしますが、地震後数年から数十年にわたって、地震以前とは違ったパターンの地殻変動が続きます。その原因は、本震の時にすべった領域が再びくっついていたり、その外側でゆっくりとすべっていたり、プレートの下にある流動的な層が変形を続けていたりすることなどが挙げられます。プレート境界のどこがどれくらいの強度で現在固着していて、次の地震の準備がどれほど進んでいるかを把握するには、観測される地殻変動から、プレート境界での固着が原因となっている成分を抽出する必要があります。そのためには地震後の地殻変動を詳しく把握する必要がありますが、海溝型巨大地震では地震時に大きくすべる領域が海底下に存在するため、海底での地殻変動観測が不可欠です。
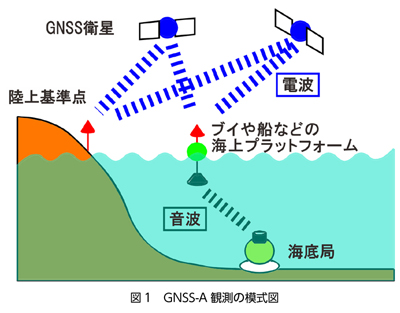
海底での地殻変動を検出するため、海上でのGNSS測位と海上-海底間の音響測距を組み合わせた観測(GNSS-A観測、図1)手法の開発が進められ、日本列島周辺で実施されてきました(例えば、[1]-[3]など)。東北沖地震後には、東北大学によって20点の海底地殻変動観測点が日本海溝沿いに広域的に新設されて繰り返し観測が行われてきました。海洋研究開発機構と東北大学では、2018年から共同で、無人海上観測機「ウェーブグライダー」を用いてGNSS-A観測を行うシステムの開発を開始し、これを用いて日本海溝沿いの観測点での繰り返し観測を継続してきました。

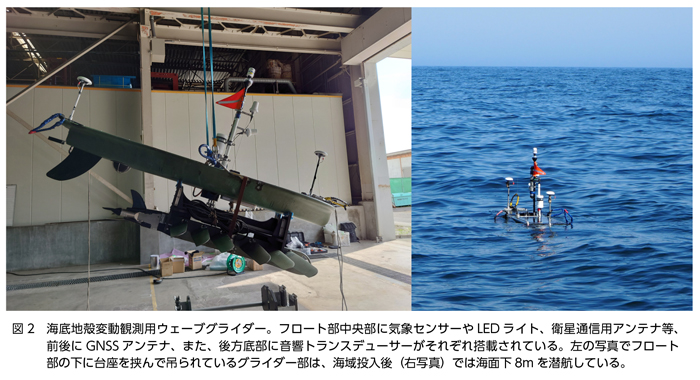
ウェーブグライダーはLiquid Robotics社(米)の開発した、自動自律航行する無人海上観測機です(図2)。海上に浮かぶフロート部と海中に位置するグライダー部が長さ約8mのアンビリカルケーブルで繋がれており、波浪による上下の動きをグライダー部の羽根によって推力に変えることによって、燃料や電力を使わずに航行できるようになっています。進路の制御や観測機器の動作に必要な電力は、フロート上の太陽光パネルの発電が賄います。航路の設定や観測機器の電源の制御、一部データの伝送等を衛星通信で行って、GNSS-A観測を観測点に着いたら始め、離れたら終了したり、観測中にデータが正しく収録できているかを確認したりできるようなシステムを構築しました。
2019年7月に行われた東京大学大気海洋研究所の研究船共同利用航海KS-19-12(新青丸)において、最初の実海域試験を行い、動作確認や得られたデータの品質の評価を行ったうえで([4])、2020年度から、春~夏にかけての1~2か月の観測と秋に1か月弱の観測を毎年行っています。2021年度からは、千島海溝沿いの巨大地震の発生が懸念される([5])根室半島沖の新設点におけるGNSS-A観測や釧路・十勝沖「海底地震総合観測システム」の津波計(海底水圧計)直上での海面高度連続観測、海面水温・塩分計及び湿度計の追加による、観測の効率化・多項目化にも取り組んでいます。

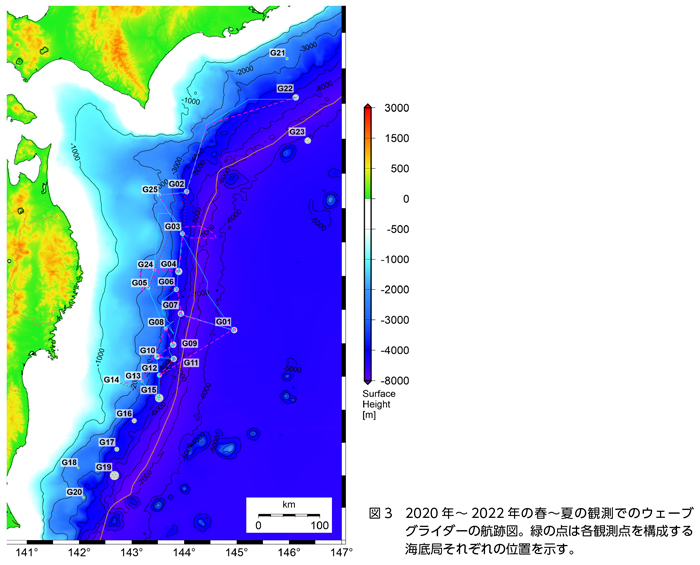
これまで行った春~夏の観測でのウェーブグライダーの航跡を図3に示します。2020年6月から7月にかけては、G04観測点で投入したのち38日間に14観測点を巡回してGNSS-A観測データを取得し、G14観測点で回収しました(赤の点線)。また、2021年4月から5月の48日間に17観測点(マゼンタの破線)を、2022年5月から7月には56日間で18観測点(シアンの実線)をそれぞれ巡回する長期観測に成功しました(いずれもG22で投入、G14で回収)。
これらの観測によって得られたデータを解析することで、東北沖地震後の地殻変動の時間変化が明らかになりつつあります。東北大学と海洋研究開発機構では、定期的(半年に1回程度)に解析結果を地震調査委員会に報告するとともに、プレート境界での固着・すべりによる地殻変動をプレート下での流動変形による変形と切り分けるべく研究を進めています。
図3からも明らかなように、千島・日本海溝域に設置されたすべての点での海底地殻変動観測を無人機によって行えているわけではありません。船舶の輻輳する海域や強い海流が流れている海域にある点でのウェーブグライダーを用いた観測が、安全面や機体の航行性能の面で困難となっているためです。2021年や2022年の航跡をよく見ると海流の影響を受けて流されてしまっていたことがあるのも見て取れます。また、秋には太陽光パネルでの発電量が十分ではなく、電池残量が危機に瀕することもありました。このような状況を踏まえると、これまで行ってきたような有人の調査船による観測は今後も欠かせないように考えられます。それぞれのプラットフォームの利点を活かして、使い分けていくことが必要である、と言えるでしょう。

本研究の一部は科研費補助金(JP19H05596)により実施されました。また、ウェーブグライダーの投入及び回収の一部は、東京大学大気海洋研究所の共同利用研究航海(KS-19-12、KS-20-16、KS-21-5及びKS-21-25、すべて「新青丸」)にて行われました。記して感謝します。
参考文献
[1] 藤本博己, 地殻活動監視に向けた海底地殻変動観測システムの開発, 地震本部ニュース2009年1月号, 10-11ページ. [2] 日野亮太, 海底地殻変動観測 ~現状・展望・課題~, 地震本部ニュース2015年夏号, 6-7ページ. [3] 海上保安庁海洋情報部, GPS-A海底地殻変動観測によって明らかになった南海トラフの固着状態, 地震本部ニュース2016年冬号, 6-7ページ. [4] Iinuma, T., et al., 2021. GNSS-Acoustic Observations of Seafloor Crustal Deformation Using a Wave Glider. Front. Earth Sci., 9, 600946. [5] 地震調査研究推進本部, 千島海溝沿いの地震活動の長期評価, 地震本部ニュース2017年冬号, 4-5ページ.
(広報誌「地震本部ニュース」令和4年(2022年)夏号)
スマートフォン版を表示中です。
パソコン版のウェブサイトを表示中です。