パソコン版のウェブサイトを表示中です。
(広報誌「地震本部ニュース」平成31年(2019年)春号)
日本の太平洋側にある日本海溝や南海トラフなどの海溝では、海側のプレートが陸側のプレートの下に年間数cm の速さで沈み込んでいます。このとき、両者が接する境界面が強く固着していると、陸側のプレートが海側のプレートによって引きずりこまれ、陸側のプレートが変形し内部にひずみが蓄積されていきます。そのひずみが限界に達すると、元に戻ろうとして破壊が起き、地震が発生すると考えられています。
海上保安庁では、こうした海溝型の巨大地震の震源域である日本海溝と南海トラフにおけるプレート境界の固着状態を把握するためにGNSS-音響測距結合方式による海底地殻変動観測(以下「GNSS-A観測」という。)を実施しており(図1)、これまでに南海トラフのプレート境界の固着状態を推定するなどの
成果を挙げています(地震本部ニュース2016年冬号)。
地震調査研究本部設置以降、基盤的調査観測として整備されてきた陸上の地震・地殻変動観測網によって、海溝型の巨大地震の発生域では、スロー地震と呼ばれる、プレート境界の断層がゆっくり動く現象が発生していることが観測されています(例えば、地震本部ニュース2018年秋号)。スロー地震自体は体に感じるような揺れを生じないため、被害を発生させることはないものの、近年の研究により巨大地震との関連性が指摘されており、巨大地震の発生メカニズム解明のための重要な研究対象となってます。
スロー地震のなかでもスロースリップ(ゆっくりすべり)と呼ばれる現象は、断層が数日から数年の時間スケールでゆっくりとずれ動く現象です。これまで、陸上のGNSSやひずみ計などの高精度な観測網によって、陸域の地下にあたるプレート境界深部で発生しているスロースリップの詳細が調査されてきました。同様の現象はプレート境界浅部においても発生していることが考えられますが、プレート境界浅部は陸域から遠く離れた海底下にあたるため、陸上の観測網では捉えることは困難であると考えられています。
GNSS-A観測は、4〜5年程度の長期間の平均的な地殻変動の傾向を捉えることに成功しています。しかしながらスロースリップは、それよりも短い時間スケールの微小な変化であるため、これまでのGNSS-A観測の実力では捉えることは困難でした。
海上保安庁では、スロースリップのような短期の現象を捉えることを目指して、時間分解能の向上を目指した技術開発を行ってきました。
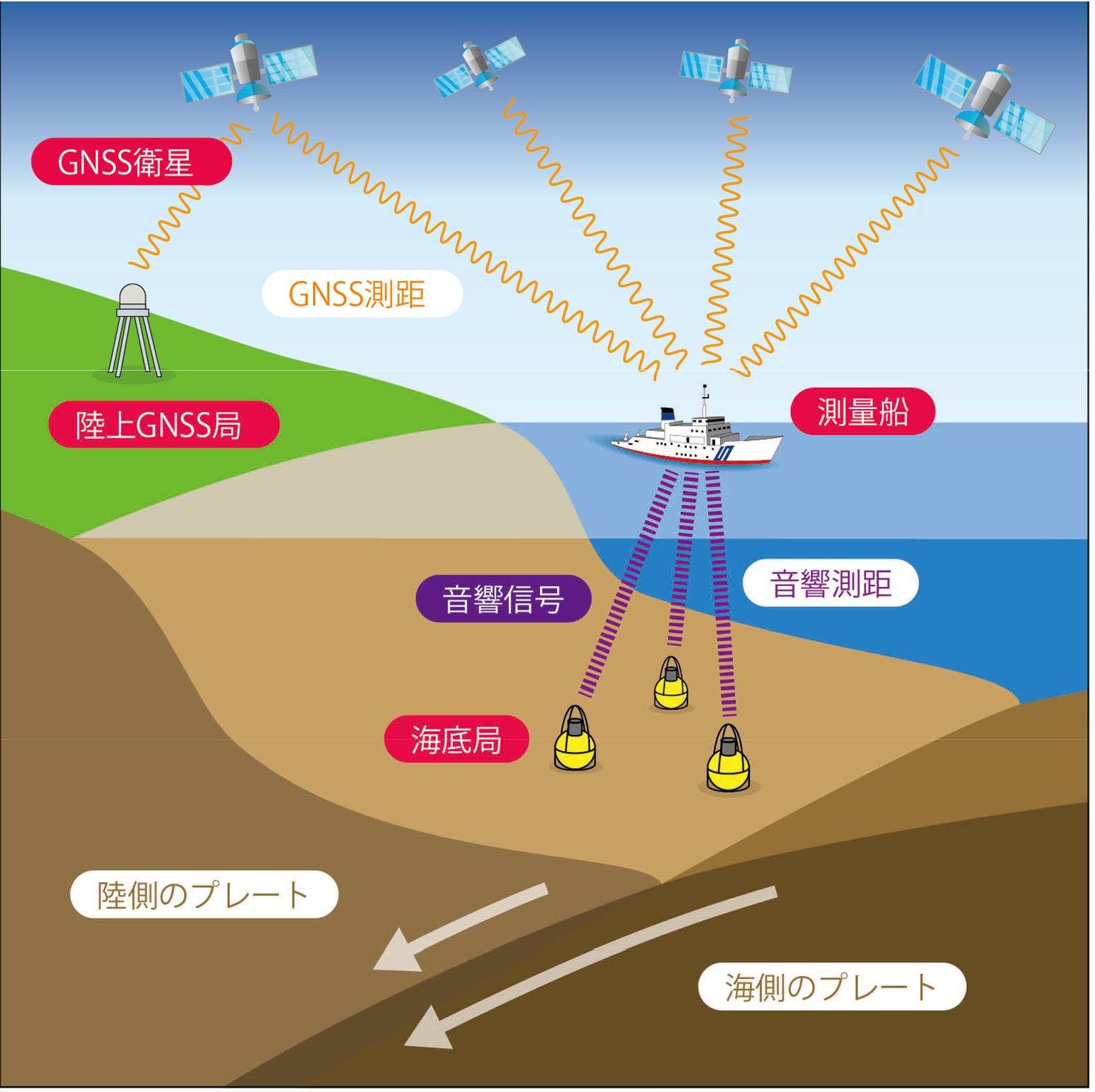
図1 GNSS-音響測距結合方式による海底地殻変動観測(GNSS-A観測)
スロースリップのような短期間の現象を捉えるためには、観測の時間分解能を向上させる必要があります。無人の連続観測が実現しているGNSS観測と違い、GNSS-A観測は観測の都度測量船で現場に赴く必要があるため、年間に2〜3回程度の観測データしか得ることができません。
スロースリップは、地殻変動の時系列において、速度(傾き)の変化として検出されます。例えば、図2の左図のように観測回数が少ない場合は、速度(傾き)は一定で、特別なイベントが発生しているようには見えません。しかし、右図のように観測回数を増やすと、途中で速度が変化している様子を検出することが可能となります。
ブイなどを用いてGNSS-A観測を無人化するための技術開発が大学等の研究機関で実施されていますが、未だ実用化には至っていません。そこで、海上保安庁では、従来の測量船を用いた観測手法のまま、観測頻度を向上させるために1回の観測に要する時間を短縮するための技術開発を進めてきました。
この観測では、約10秒間隔で測量船から海底局に対して音波を発射します。従来は複数台設置してある海底局に対して1台ごとに個別に音波を発射することしかできませんでした(図3左)。そこで、あらたに音響装置のハードウェア的な改良及び音波の検出アルゴリズムのソフトウェア的な改良を施すことで、最大で4台の海底局に対して音波を同時に発信することが可能となりました(図3右)。このことにより、観測時間を大幅に短縮することに成功し、年間の観測頻度が6〜8回程度まで向上しました。
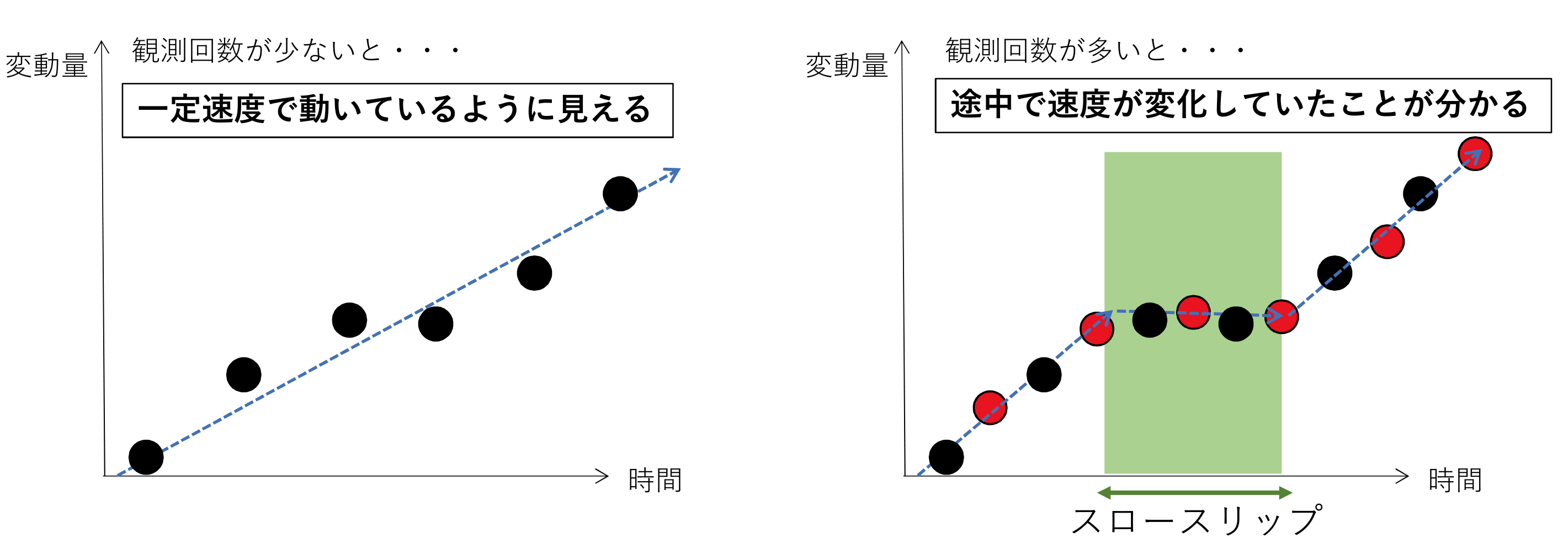
図2 観測頻度が短期時間スケールの現象の検出に与える影響の概念図
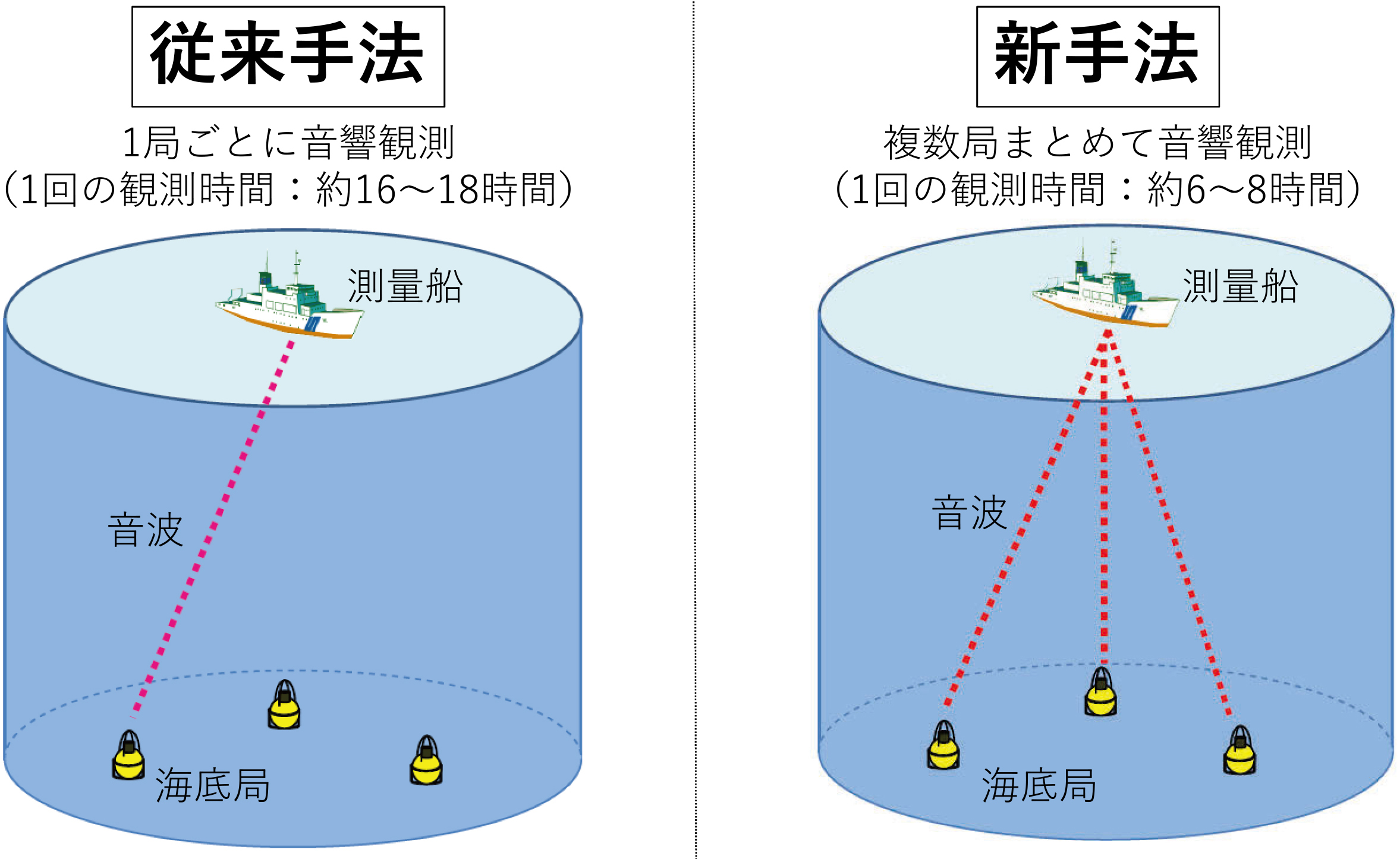
図3 音響装置の改良による複数海底局の同時観測
こうした時間分解能向上のための装置の改良を2016年に実施し、その後も継続的に観測を行ってきました。その結果、2017年末以降の観測データから紀伊水道沖の海底に設置してある観測点において、それまでの変動傾向とは異なる変化が検出されました。南海トラフでは、プレート境界が固着している通常の状況では、フィリピン海プレートの沈み込みよって、陸側のプレートが概ね北西方向に動かされています。2017年末から2018年にかけての観測結果はそれとは逆の南向きの変化を示していました(図4)。これはプレート境界の固着がはがれ、陸側のプレートがそれまで押されていた方向の逆向きにすべったことを示唆しています。また、同じ期間における陸上GNSSの観測データからはこうした変化は見られなかったため、この現象は、陸域から遠く離れた海域で発生していると考えられます。そこで、GNSS-A観測で得られた変化を説明し、かつ陸上GNSS観測点では変化が現れないということを条件に、すべりの断層モデルを推定した結果、図のような位置においてすべったとするモデルが最適解として求まりました。これは、プレート境界浅部においてスロースリップが発生していたことを示しており、陸上の観測網では検知できなかった現象をGNSS-A観測によって捉えることに成功したことになります。
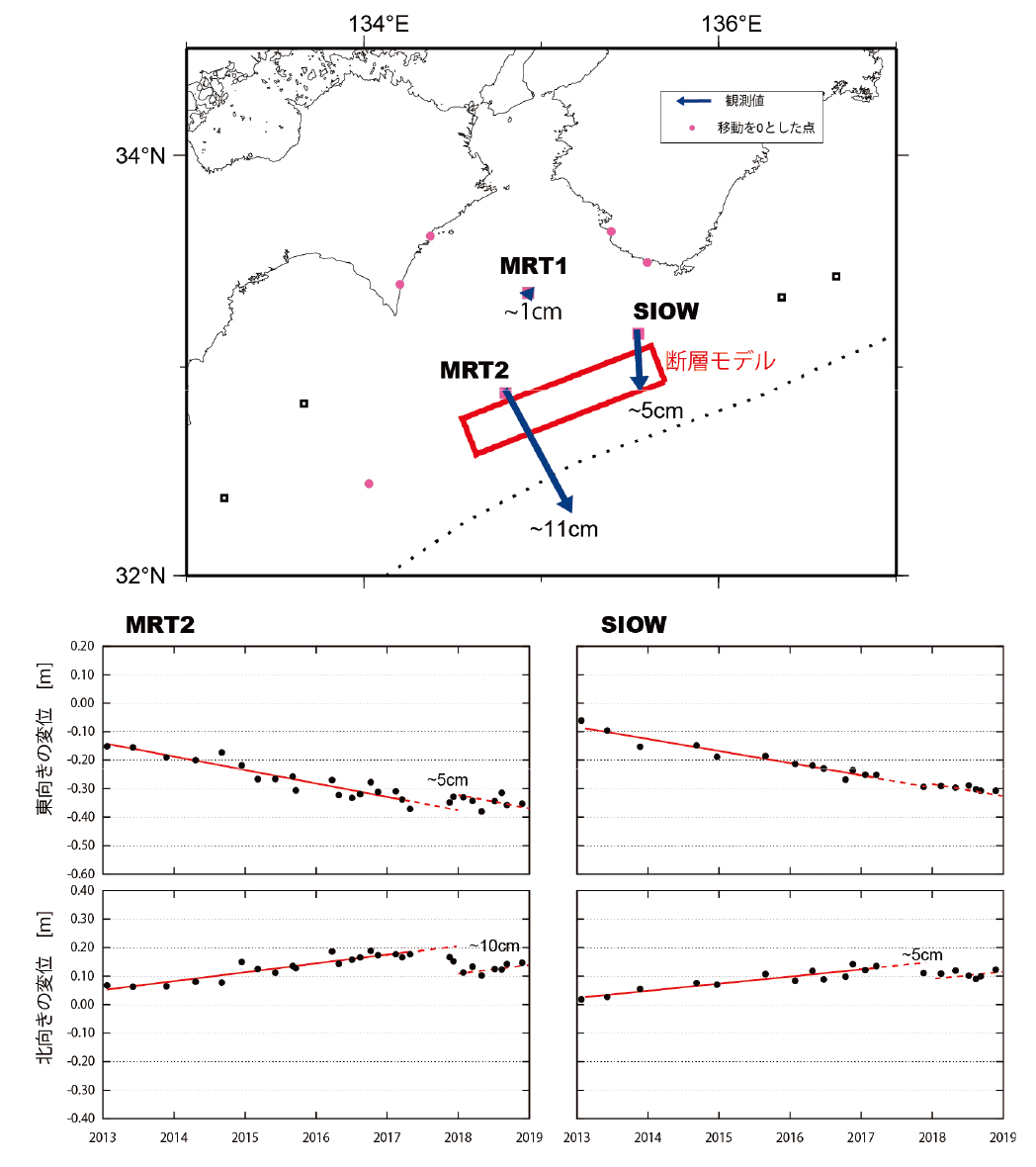
図4 紀伊水道沖の海底GNSS-A観測点で検出されたプレート境界浅部のスロースリップ
これまで、陸域の稠密な地震・地殻変動観測網によって、プレート境界深部のスロー地震についての研究が進展してきました。海域における観測の難しさから、詳細が分かっていなかったプレート境界浅部のスロー地震についても、海洋研究開発機構が構築を進めている孔内観測網などの新たな観測網の展開によって、新しい発見がなされています(例えば、地震本部ニュース2018年春号)。今回の海上保安庁のGNSS-A観測によるスロースリップの発見も含めて、海域観測のより一層の推進によって、南海トラフ巨大地震の理解が進むことが期待されます。
(広報誌「地震本部ニュース」平成31年(2019年)春号)
スマートフォン版を表示中です。
パソコン版のウェブサイトを表示中です。